Blending ontologies and language models to generate sound and natural robot explanations
Abstract
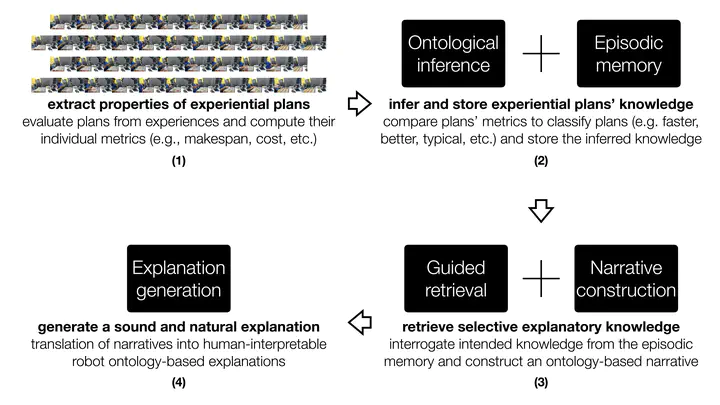
This work introduces an approach to creating semantically grounded and natural robot explanations combining ontology-based reasoning with large language models (LLMs). Ontologies ensure logical consistency and domain grounding, while LLMs provide fluent and interactive explanation generation. Empirical results highlight the potential of ontology–LLM integration to advance explainable robotics, and promote more intuitive human-robot collaboration.
Type
Publication
International Conference on Autonomous Agents and MultiAgent Systems