Abstract
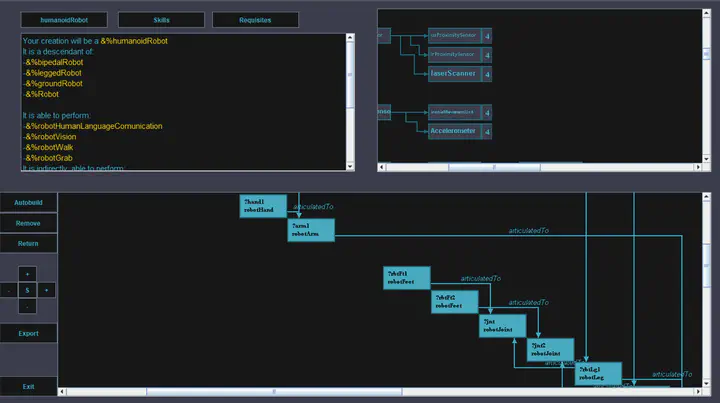
This communication presents an application for the use of ontologies in the generation of robot structures. The ontology developed for this app relies on the IEEE Standard Ontologies for Robotics and Automation (ORA) and it incorporates a set of concepts, relations and axioms that link robotic skills with the structural parts needed for their realization. The user can select a base configuration and/or a set of desired skills that the robot should be able to perform. Then, the application evaluates the axioms and returns an abstract structure that can carry out the requested skills. The final implementation of the structure can be achieved with any modular robotic platform that could identify each structural part with a physical device.
Type
Publication
International Conference on Intelligent Robots and Systems