Abstract
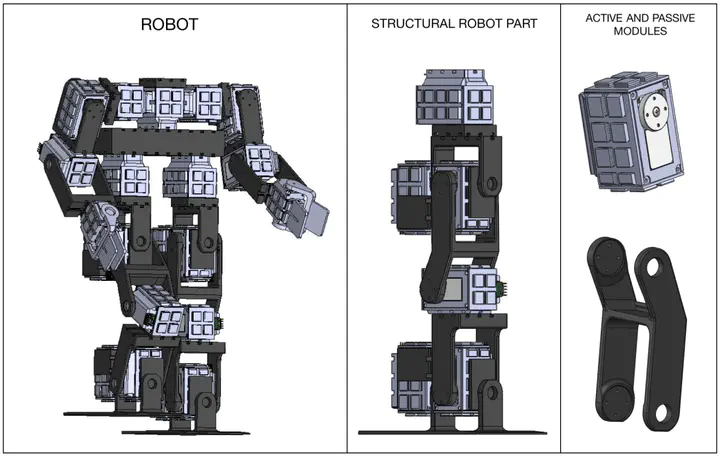
This work presents a proof of concept for an end-to-end process for the agile design, control and programming of robots. The user selects a set of abilities for the desired robot, and the system automatically generates the robot structureand the controllers needed for the high level programming of the robot. This process relies on two pivotal concepts for our approach: ontologies and modular robots. An ontology (ADROn), constructed upon the IEEE Standard Ontologies for Robotics and Automation (ORA), is used by an intelligent system to relate the robot types with the requested set of abilities. Then,a parameterized design process generates the passive components (e.g. links) and selects the active modules (e.g. actuators) from a collection of 3D printable, modular robotic components (ParMoR). Finally, the controllers, generated as ROS services,are interfaced with a visual programming language, Bitbloq, suitable for novice users. Examples of the generation process of different types of robots (wheeled, snake, humanoid, hexapods) are detailed. The process is presented as an educational platformfor the teaching of robotics, while the applicability to other fields and the advantages of this methodology are also discussed in the paper.