Abstract
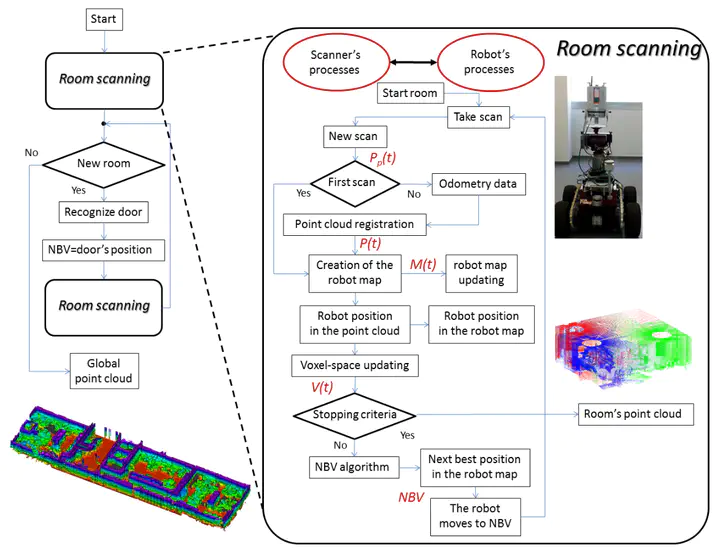
This paper is framed in both 3D digitization and 3D data intelligent processing research fields. Our objective is focused on developing a set of techniques for the automatic creation of simple three-dimensional indoor models with mobile robots. The document presents the principal steps of the process, the experimental setup and the results achieved. We distinguish between the stages concerning intelligent data acquisition and 3D data processing. This paper is focused on the first stage. We show how the mobile robot, which carries a 3D scanner, is able to, on the one hand, make decisions about the next best scanner position and, on the other hand, navigate autonomously in the scene with the help of the data collected from earlier scans. After this stage, millions of 3D data are converted into a simplified 3D indoor model. The robot imposes a stopping criterion when the whole point cloud covers the essential parts of the scene. This system has been tested under real conditions indoors with promising results. The future is addressed to extend the method in much more complex and larger scenarios.